FreeRTOS
Add FreeRTOS library
Download FreeRTOS
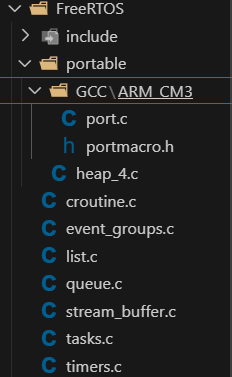
source-code.ziphereCreate a FreeRTOS folder then add all file with a
.cextention and the include folder from the above directory to this folder.Copy
portable/GCC/ARM_CM3to your folder. Use ARM_CM3 for Cortex-M3, or choose another option that matches your microcontroller.Copy
portable/MemMang/heap4.cto your folder.
Create
FreeRTOSConfig.hfile inCore/Inc/and add these line
/*
* FreeRTOS V202212.01
* Copyright (C) 2020 Amazon.com, Inc. or its affiliates. All Rights Reserved.
*
* Permission is hereby granted, free of charge, to any person obtaining a copy of
* this software and associated documentation files (the "Software"), to deal in
* the Software without restriction, including without limitation the rights to
* use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
* the Software, and to permit persons to whom the Software is furnished to do so,
* subject to the following conditions:
*
* The above copyright notice and this permission notice shall be included in all
* copies or substantial portions of the Software.
*
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
* IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
* FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
* COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
* IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
* CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
*
* https://www.FreeRTOS.org
* https://github.com/FreeRTOS
*
*/
#ifndef FREERTOS_CONFIG_H
#define FREERTOS_CONFIG_H
/* Library includes. */
#include "stm32f1xx.h"
/*-----------------------------------------------------------
* Application specific definitions.
*
* These definitions should be adjusted for your particular hardware and
* application requirements.
*
* THESE PARAMETERS ARE DESCRIBED WITHIN THE 'CONFIGURATION' SECTION OF THE
* FreeRTOS API DOCUMENTATION AVAILABLE ON THE FreeRTOS.org WEB SITE.
*
* See http://www.freertos.org/a00110.html
*----------------------------------------------------------*/
#define configUSE_PREEMPTION 1
#define configUSE_IDLE_HOOK 0
#define configUSE_TICK_HOOK 0
#define configCPU_CLOCK_HZ ( ( unsigned long ) 8000000 ) //Change this if you use another system clock
#define configTICK_RATE_HZ ( ( TickType_t ) 1000 )
#define configMAX_PRIORITIES ( 5 )
#define configMINIMAL_STACK_SIZE ( ( unsigned short ) 128 )
#define configTOTAL_HEAP_SIZE ( ( size_t ) ( 17 * 1024 ) )
#define configMAX_TASK_NAME_LEN ( 16 )
#define configUSE_TRACE_FACILITY 0
#define configUSE_16_BIT_TICKS 0
#define configIDLE_SHOULD_YIELD 1
#define configUSE_MUTEXES 1
/* Set the following definitions to 1 to include the API function, or zero
to exclude the API function. */
#define INCLUDE_vTaskPrioritySet 1
#define INCLUDE_uxTaskPriorityGet 1
#define INCLUDE_vTaskDelete 1
#define INCLUDE_vTaskCleanUpResources 0
#define INCLUDE_vTaskSuspend 1
#define INCLUDE_vTaskDelayUntil 1
#define INCLUDE_vTaskDelay 1
/* This is the raw value as per the Cortex-M3 NVIC. Values can be 255
(lowest) to 0 (1?) (highest). */
#define configKERNEL_INTERRUPT_PRIORITY 255
/* !!!! configMAX_SYSCALL_INTERRUPT_PRIORITY must not be set to zero !!!!
See http://www.FreeRTOS.org/RTOS-Cortex-M3-M4.html. */
#define configMAX_SYSCALL_INTERRUPT_PRIORITY (5<<4) /* equivalent to 0xb0, or priority 11. */
/* This is the value being used as per the ST library which permits 16
priority values, 0 to 15. This must correspond to the
configKERNEL_INTERRUPT_PRIORITY setting. Here 15 corresponds to the lowest
NVIC value of 255. */
#define configLIBRARY_KERNEL_INTERRUPT_PRIORITY 15
#endif /* FREERTOS_CONFIG_H */
Here, I use the STM32F1 series, so I include
#include "stm32f1xx.h". You need to change this to the header file relevant to your microcontroller.Then open startup file in
Core/Src/StartupAdd these code below .global Default_Handler
.extern xPortPendSVHandler .extern xPortSysTickHandler .extern vPortSVCHandler
Then replace 3 handler below to RTOS`s handler
.word vPortSVCHandler //SVC_Handler .word DebugMon_Handler .word 0 .word xPortPendSVHandler //PendSV_Handler .word xPortSysTickHandler //SysTick_Handler
Notes in FreeRTOSConfig.h
configMAX_SYSCALL_INTERRUPT_PRIORITY
In FreeRTOSConfig.h file, there is a line
#define configMAX_SYSCALL_INTERRUPT_PRIORITY (5<<4)
Stm32 uses 4 MSB bytes to present the priority of priority`s register.
This line means that your ISR function can use the FreeRTOS API only if the function’s priority is between 5 and 15.
For example: the USART2 ISR
/* USART2 interrupt Init */
NVIC_SetPriority(USART2_IRQn, NVIC_EncodePriority(NVIC_GetPriorityGrouping(), 5, 0));
NVIC_EnableIRQ(USART2_IRQn);